Jaw C++ Node
Maya Jaw Node
So I wanted to recreate one of the setups I’d done recently via nodes, but in C++ to make the network more manageable and see if I can clean up the approach somewhat.
The jaw is an interesting area to mess around with because it’s not just a rotation. There are translations to consider when setting up the jaw too.
This video is a pretty good example of what I’m looking at getting out of the node;
Jaw Movement:
Here’s a good reference page by chrisevans
Rotation
- Saggital
- Vertical
- Horizontal
We’re going to need to protrude and depress the jaw while these rotations are happening.
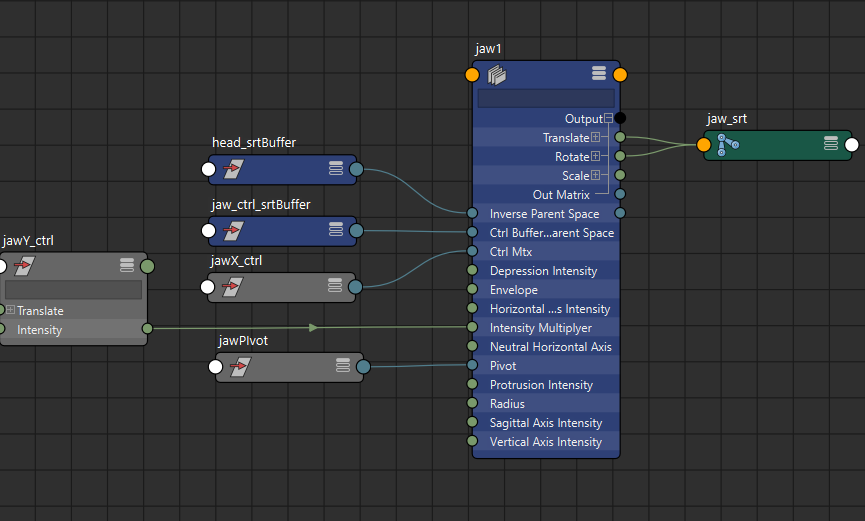
The node
So I want to create this motion all off a `single’ controller, but after a show I recently worked on I’ve decided it is probably best to have the motion driven from two curves. tY on the first is the horizontal axis direction, and tX on the 2nd drives the vertical axis direction.
From there the node takes care of the saggital / protrudes based of the values of the tx and ty
Those with a keen eye will notice I haven’t hit the saggital hinging really hard. I’ve left softer as I found in the node based setup if it was hinged to hard it was difficult to animation a more natural motion.